Simulationsmodus in Can Do
In der Projekt- und Ressourcenplanung müssen ständig Entscheidungen getroffen werden. Was passiert, wenn ein wichtiges...
.png?width=200&height=80&name=CanDo%20Logo%20transparent%20(500%20x%20200%20px).png)

Can Do verändert grundsätzlich nie von selbst die Daten im System. Es werden also keine Pakete verschoben oder Ressourcen automatisch zugewiesen.
Allerdings kann es manchmal doch sinnvoll sein, das die Software logische Folgeaktionen von selber durchführt. Das erspart arbeitet und erhöht den Komfort. Netzpläne können hier sehr komplex sein und es ist schwer herauszufinden, was die Aktion ist. Klar ist, dass wenn ein Paket zeitlich verschoben wird, der Planer den Nachfolger auch schieben will (und dessen Nachfolger usw.).
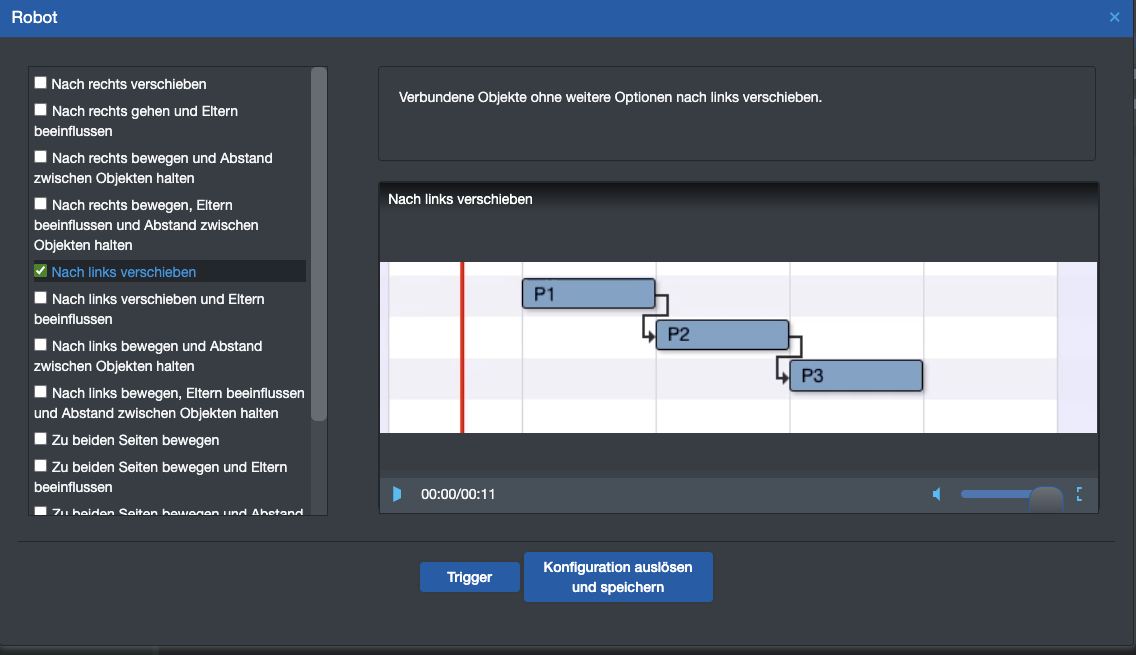
Um die Kontrolle zu behalten haben wir einen Robot entwickelt der gewisse Aktionen auf Knopfdruck oder automatisch im Hintergrund durchführt. Die möglichen Aktionen werden bei der Konfiguration, die jeder Anwender für sich individuell einstellen kann, durch Lernvideos erklärt.
Der Robot hat einen eigenen Tab und eigene Buttons zur Steuerung:
Wenn der Robot auf "Automatik" eingestellt ist, kann das an der kleinen grünen Lampe erkannt werden (sonst ist diese rot).

Jede Möglichkeit wird in einem Video erklärt. Das Verhalten kann auch kombiniert werden. Unlogische Kombinationen werden verhindert.
Sollte der Robot doch mal was machen, was für den Planer nicht in Ordnung ist, kann über "UNDO" gezielt "Rückgängig" gemacht werden.
Objekte die nicht verschoben werden dürfen, wie JIRA-Pakete oder abgeschlossene Meilensteine werden nicht angefasst.
Als Mitglied der Geschäftsführung verantwortet Thomas die operative Leitung der Entwicklung inklusive Konzeption, Design und Weiterentwicklung der Software. Ebenfalls berät er Kunden über Best Practices und begleitet den Roll-Out.
In der Projekt- und Ressourcenplanung müssen ständig Entscheidungen getroffen werden. Was passiert, wenn ein wichtiges...
Die Can Do BI App zur Geschäftsanalytik wurde entwickelt, um Unternehmen eine umfassende Datenanalyse auf Basis der...
Die Anforderungen an datengetriebene Entscheidungen wachsen – mit der Can Do Base Foundation erhalten Sie eine...